#include <SAHKDTree.h>
Inherits KDTree.
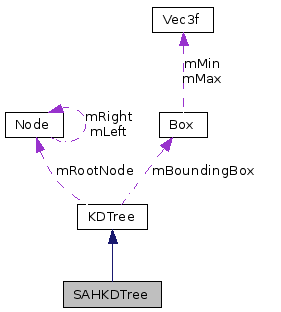
Inheritance diagram for SAHKDTree:
Public Member Functions | |
| SAHKDTree (float lambda=0.8f, float kTraversal=5.0f, float kIntersect=1.0f) | |
| virtual | ~SAHKDTree () |
| virtual void | buildTree (const PrimitiveList &list, const Box &bbox) |
Private Types | |
| typedef std::vector< Event > | EventList |
| Event list. | |
Private Member Functions | |
| void | buildTree (Node *node, const Box &bbox, EventList &events, unsigned int depth) const |
| virtual bool | terminate (const Node *current, float minCost, unsigned int depth) const |
| float | cost (float probability_left, float probability_right, unsigned int number_left, unsigned int number_right) const |
| float | SAH (Side &side, const Box &bbox, const SplitPlane &plane, unsigned int number_left, unsigned int number_right, unsigned int number_middle) const |
| SplitPlane | findBestPlane (float &minCost, const Node *node, const Box &bbox, const EventList &events) const |
| std::pair< Box, Box > | classifyAndSplice (EventList &eLeft, EventList &eRight, Node *node, const Box &bbox, const EventList &events, const SplitPlane &plane) const |
| void | generateEvents (EventList &events, Primitive *primitive, const Box &bbox) const |
Private Attributes | |
| const float | mLambda |
| Lambda factor for biasing the cost function. | |
| const float | mKTraversal |
| Traversal cost factor. | |
| const float | mKIntersect |
| Intersection cost factor. | |
Definition at line 17 of file SAHKDTree.h.
typedef std::vector<Event> SAHKDTree::EventList [private] |
| SAHKDTree::SAHKDTree | ( | float | lambda = 0.8f, |
|
| float | kTraversal = 5.0f, |
|||
| float | kIntersect = 1.0f | |||
| ) | [inline] |
Constructor. All parameters are initialized with good default values
| lambda | Bias factor for cost function to favor empty nodes | |
| kTraversal | Relative node traversal cost factor | |
| kIntersect | Relative primitive intersection cost factor |
Definition at line 26 of file SAHKDTree.h.
| SAHKDTree::~SAHKDTree | ( | ) | [virtual] |
Destructor
Definition at line 14 of file SAHKDTree.cpp.
| void SAHKDTree::buildTree | ( | const PrimitiveList & | list, | |
| const Box & | bbox | |||
| ) | [virtual] |
Build the kd-tree from the given primitive list.
| list | List of all primitives | |
| bbox | Overall bounding box |
Definition at line 24 of file SAHKDTree.cpp.
References KDTree::buildTree(), generateEvents(), LOG, and KDTree::mRootNode.
Referenced by buildTree().
| void SAHKDTree::buildTree | ( | Node * | node, | |
| const Box & | bbox, | |||
| EventList & | events, | |||
| unsigned int | depth | |||
| ) | const [private] |
Recursive tree building method
| node | Current parent node | |
| bbox | Bounding box of the node | |
| events | Event list for the node. Should be sorted. | |
| depth | Current node depth |
Definition at line 52 of file SAHKDTree.cpp.
References buildTree(), classifyAndSplice(), Node::clear_primitives(), SplitPlane::direction(), findBestPlane(), Node::left(), NO_AXIS, SplitPlane::position(), Node::right(), Node::setLeftRight(), Node::setSplitAxis(), Node::setSplitPlane(), and terminate().
| bool SAHKDTree::terminate | ( | const Node * | current, | |
| float | minCost, | |||
| unsigned int | depth | |||
| ) | const [private, virtual] |
Determine if building tree should terminate on the current node. This implementation uses tree depth and minimal primitive count constraints, as well as adaptive cost-based termination criterion.
| current | Current node | |
| minCost | Minimal traversal cost for current node | |
| depth | Depth of the current node |
Reimplemented from KDTree.
Definition at line 114 of file SAHKDTree.cpp.
References mKIntersect, Node::primitives_count(), and KDTree::terminate().
Referenced by buildTree().
| float SAHKDTree::cost | ( | float | probability_left, | |
| float | probability_right, | |||
| unsigned int | number_left, | |||
| unsigned int | number_right | |||
| ) | const [inline, private] |
Estimate cost of a node with surface area heuristic
| probability_left | Probability, that left node will be hit | |
| probability_right | Probability, that right node will be hit | |
| number_left | Number of primitives in the left node | |
| number_right | Number of primitives in the right node |
Definition at line 98 of file SAHKDTree.h.
References mKIntersect, mKTraversal, and mLambda.
Referenced by findBestPlane(), and SAH().
| float SAHKDTree::SAH | ( | Side & | side, | |
| const Box & | bbox, | |||
| const SplitPlane & | plane, | |||
| unsigned int | number_left, | |||
| unsigned int | number_right, | |||
| unsigned int | number_middle | |||
| ) | const [private] |
Surface area heuristic based cost estimation.
| side | Output parameter. Side where to put primitives hit by split plane | |
| bbox | Bounding box of given node | |
| plane | Split plane to calculate costs for | |
| number_left | Number of primitives left of the plane | |
| number_right | Number of primitives hit by the plane | |
| number_middle | Number of primitives right of the plane |
Definition at line 133 of file SAHKDTree.cpp.
References Box::area(), cost(), S_LEFT, and S_RIGHT.
Referenced by findBestPlane().
| SplitPlane SAHKDTree::findBestPlane | ( | float & | minCost, | |
| const Node * | node, | |||
| const Box & | bbox, | |||
| const EventList & | events | |||
| ) | const [private] |
Find best plane for the next split in O(N). Event list should be sorted before calling this method.
| minCost | Output parameter. Minimal cost for splitting given node | |
| node | Node to find the best split plane for | |
| bbox | Bounding box of the node | |
| events | Presorted event list for the node |
Definition at line 169 of file SAHKDTree.cpp.
References cost(), SplitPlane::direction(), EPSILON, ET_END, ET_PLANAR, ET_START, Box::maxVertex(), Box::minVertex(), SplitPlane::position(), Node::primitives_count(), SAH(), and SplitPlane::setSide().
Referenced by buildTree().
| std::pair< Box, Box > SAHKDTree::classifyAndSplice | ( | EventList & | eLeft, | |
| EventList & | eRight, | |||
| Node * | node, | |||
| const Box & | bbox, | |||
| const EventList & | events, | |||
| const SplitPlane & | plane | |||
| ) | const [private] |
Classify primitives to be either left of, right of, or overlapping given plane in a single sweep over event list, then generate event lists and primitive lists for children.
| eLeft | Output parameter. Event list of the left child | |
| eRight | Output parameter. Event list of the right child | |
| node | Current node | |
| bbox | Bounding box of the current node | |
| events | Event list of the current node | |
| plane | Split plane to split with |
Definition at line 291 of file SAHKDTree.cpp.
References Node::add(), SplitPlane::direction(), ET_END, ET_PLANAR, ET_START, generateEvents(), Node::left(), SplitPlane::position(), Node::primitive(), Node::primitives_count(), Node::right(), S_BOTH, S_LEFT, S_RIGHT, SplitPlane::side(), and Box::split().
Referenced by buildTree().
| void SAHKDTree::generateEvents | ( | EventList & | events, | |
| Primitive * | primitive, | |||
| const Box & | bbox | |||
| ) | const [private] |
Generate events for all dimensions and add them to the list
| events | Output parameter. List ov events to add new events to | |
| primitive | Primitive to generate events for | |
| bbox | Bounding box to clip primitive to |
Definition at line 258 of file SAHKDTree.cpp.
References Primitive::bounds(), Box::clip(), EPSILON, ET_END, ET_PLANAR, ET_START, Box::maxVertex(), and Box::minVertex().
Referenced by buildTree(), and classifyAndSplice().
const float SAHKDTree::mLambda [private] |
Lambda factor for biasing the cost function.
Definition at line 54 of file SAHKDTree.h.
Referenced by cost().
const float SAHKDTree::mKTraversal [private] |
const float SAHKDTree::mKIntersect [private] |
Intersection cost factor.
Definition at line 60 of file SAHKDTree.h.
Referenced by cost(), and terminate().
 1.5.1
1.5.1