max planck institut
informatik
informatik

LectureStatistical Geometry Processing (Winter Semester 2011/2012) ContactInstructor:Teaching Assistants:
Statistical Geometry ProcessingThis lecture gives an introduction to the research field of statistical geometry processing. Informally spoken, the goal in this research area is to develop algorithms that are able to understand geometry. We want to develop algorithms that can analyze and represent the structure of geometric objects, and use this knowledge for analyzing, reconstructing, and modeling 3D geometry. There are a many application domains where such approaches are needed, such as medical data analysis (3D tomography), 3D scanning of cities for virtual maps, or content creation for 3D computer games. The approach of this lecture will be to look at mathematical tools and then see how these could be applied: Figuratively spoken, we will iterate between searching for hammers (tools) and nails (problems to be solved). We will look at the theory, the applications, and conduct exercises to test the tools in practice. Many of the techniques introduced in this lecture are actually rather generic and applicable beyond the domain of computer graphics and vision so that the lecture might be useful even for solving problems in other areas of algorithmic data analysis. This is the first time this lecture is held. Therefore, the information given is so far still subject to change.
Lecture TopicsThe topics covered in this lecture will probably include (subject to change): Mathematical background:
Machine learning fundamentals
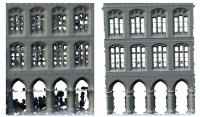
Modeling tools
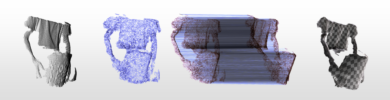
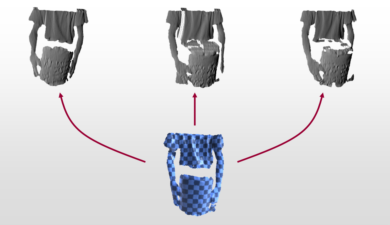
Surface reconstruction
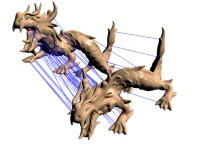
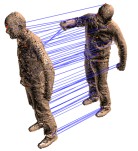
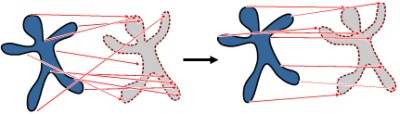
Correspondence problems
PrerequisitesThe course is targeting master students and advanced bachelor students (towards the end of their studies). We will introduce most of the necessary background in the course, but some prior knowledge in the following areas might still be required to follow at the intended pace:
LocationThe lecture will be held Tuesdays 16-18h (s.t.) in E1 4 (MPI-Informatik), Room 024 (ground floor). Excercise course: Wednesday, 12:00-13:30h (s.t.) in E1 4 (MPI-Informatik), Room t.b.a.. OrganizationThere will be a lecture (2h a week) and exercises (2h a week). The exercises will focus on practical experiments with the techniques discussed in the lecture. If you are interested in the course, and/or you have any questions or suggestions relating the course, feel invited to contact us via email at any time. SlidesThis is the collection of slides available so far. The schedule for future slides is only approximate. You need a password to access the slides; for external viewers, a public version is provided below as well.
Public versions of the slides (only minor differences, no password required):
AssignmentsHere is the collection of assignment sheets handed-out so far.
Software FrameworkBelow is the software framework we provide for solving the assignments. Using the framework is optional, but please contact us in advance if you are planning on using different platforms.
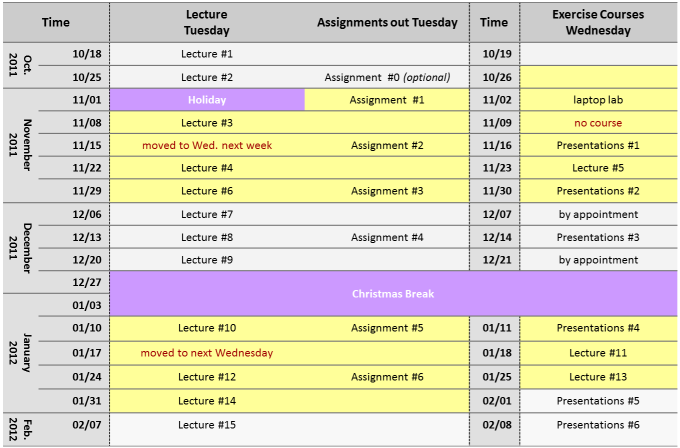
Schedule
(Schedule updated: Jan. 30th 2012, 19:07h CET)
|
|
||||||||||||||||||||||||